After two years of experience with the TU Delft Solar Boat, Flying Fish Co-founders Johan and Gijsbert created a dynamical model for this type of boat. With the onboard sensors of the Solar Boat from 2016 and help from the team members, we were able to validate our parametric dynamics model.
Our research was published as follows: G. P. van Marrewijk, J. K. Schonebaum, A. L. Schwab. 2018, March. “An Experimentally Validated Dynamical Model of a Single-Track Hydrofoil Boat”. Naval Engineers Journal, Vol. 130-1, American Society of Naval Engineers. Download the paper here.
With this paper we won the Mandles Prize for Hydrofoil Excellence 2017, which has been granted by the International Hydrofoil Society. The design approach based on our model has been considered a valuable tool for future low-drag boat design. It was awarded with the National Maritime Designer Award in 2018.
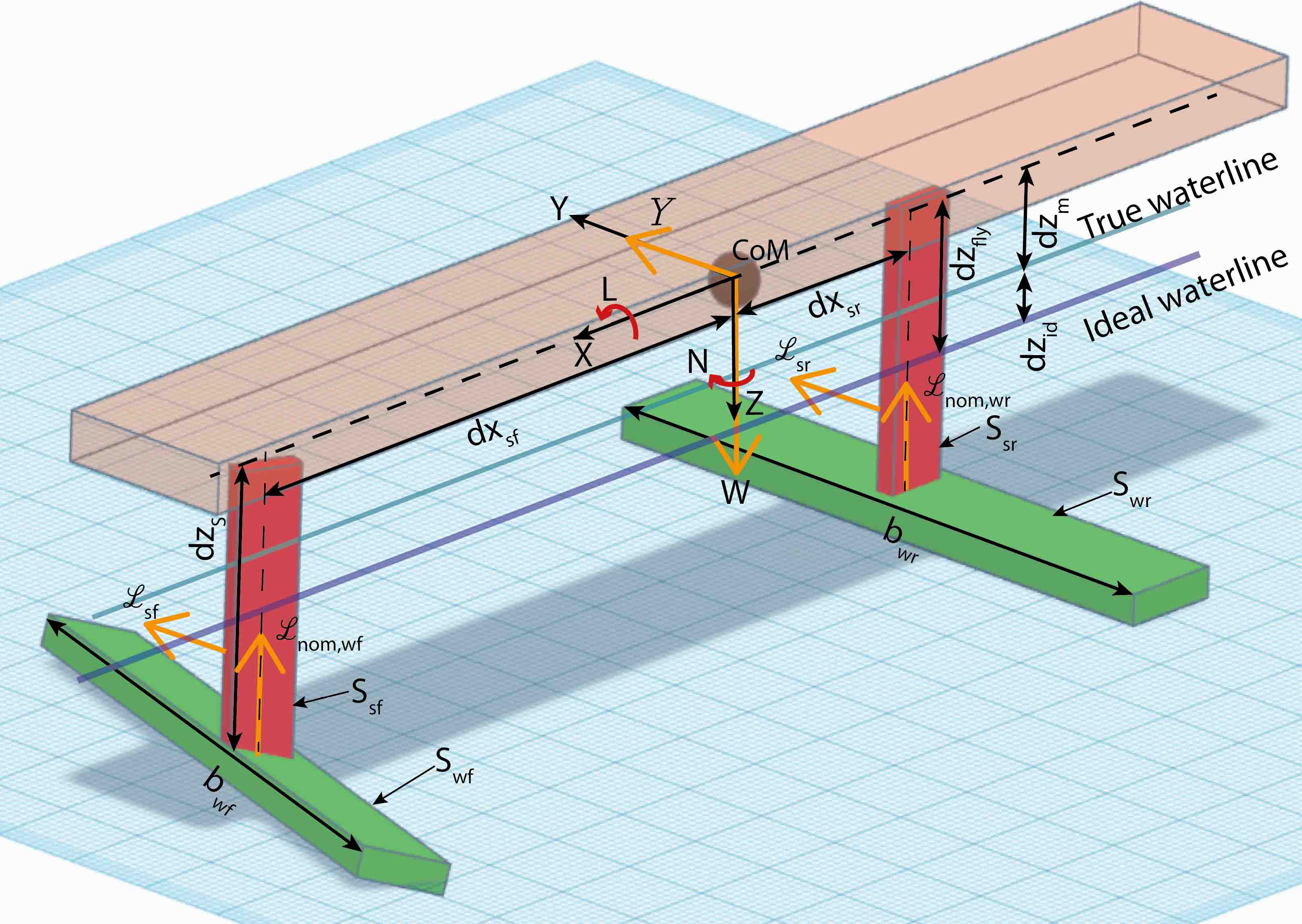
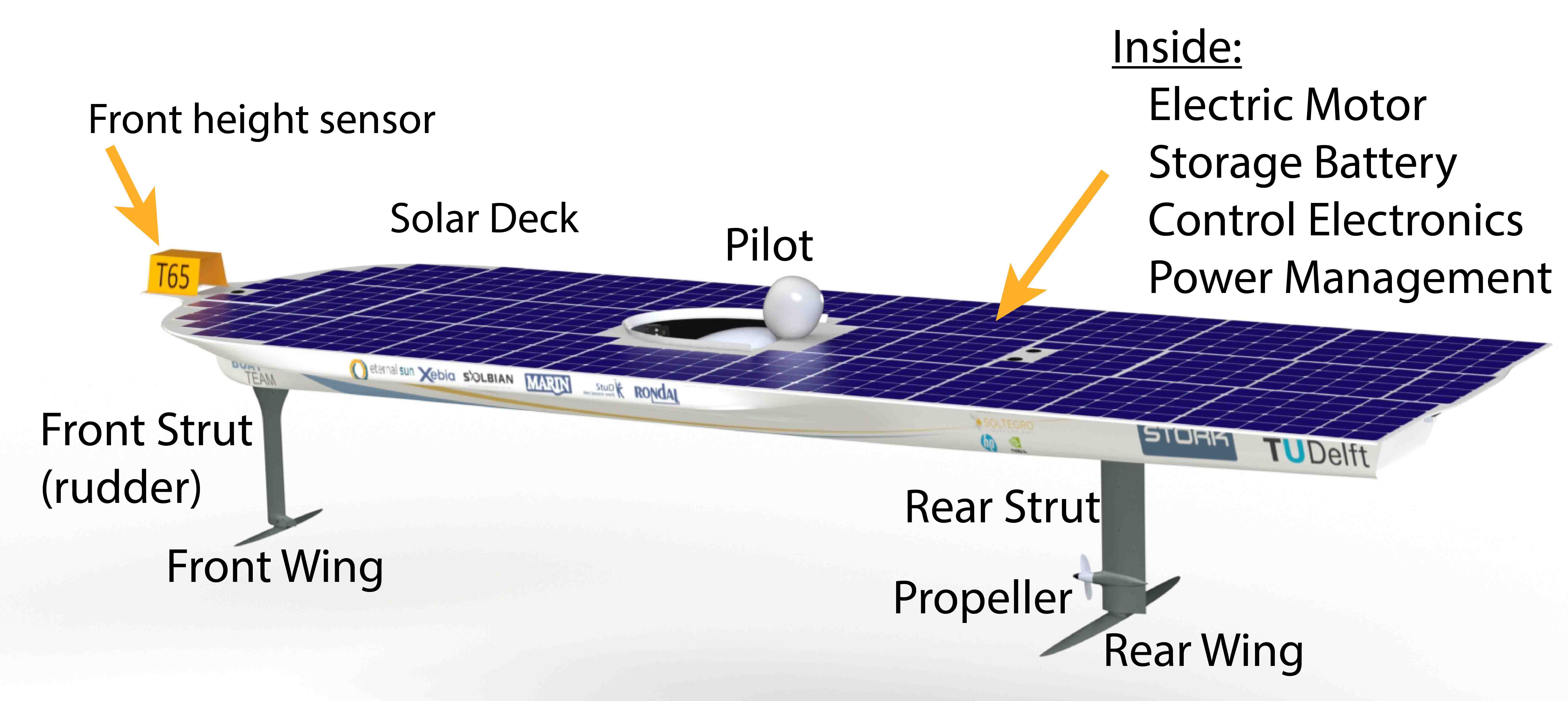
Single-track hydrofoil boats are boats where the two inverted T-shape wings are placed on the centre line of the hull. The use of two vertical struts with hydrofoils ensures that the boat has a low drag, so that the solar power could be used efficiently. By using the front strut as a rudder, the dynamics of the boat can be compared to those of a bicycle: by steering into the direction of the rolling motion, the boat can fly upright.
The yaw, roll and sideslip motions of the flying boat depend on the steering input of the ‘pilot’. Unfortunately, no mathematical model was available to predict these motions. Instead, engineering parameters of the Solar Boat 2014 were based on other single-track hydrofoil boats, such as the Yamaha OU32 and this human powered hydrofoil. The boat was able to sail and make turns with this principle, but we had the feeling that improvements in the dynamic behaviour were possible.
In 2015, our successors in the TU Delft Solar Boat Team desired to use the single-track hydrofoil concept again. This time, as members of the technical advisory committee, we modelled the dynamic behaviour of the boat to find the optimum strut length, flight height and distance between the two hydrofoils. This model was based on conventional aircraft flight dynamics.
Application of the model resulted in a single-track hydrofoil boat design with shorter struts and a more distance between the two hydrofoils. The performance of this boat was beyond expectations. Check it out in the video below.
At the time this boat was sailing around, the dynamical model that was used to predict the boat dynamics had not yet been validated, thus making its application to new boats risky. With enthusiastic support from Dr. Ir. Arend Schwab and members of the TU Delft Solar Boat Team, Johan and Gijsbert set out to experimentally validate the dynamical model.
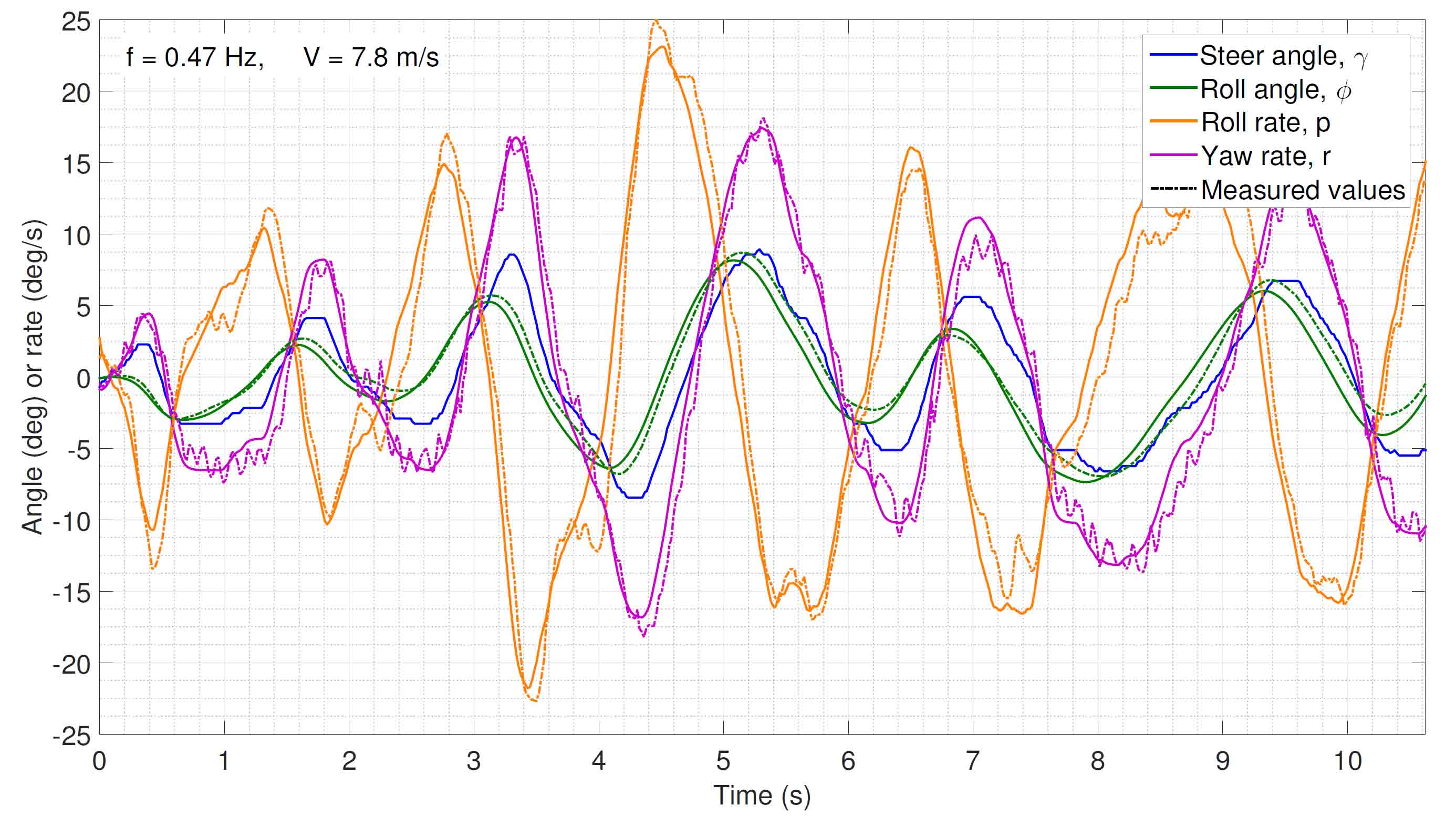
To do so, motion sensor data from the TU Delft Solar Boat 2016 was compared to the predicted motions under a given sinusoidal steer input. We found that our mathematical model very accurately predicts the dynamic behaviour of the single-track hydrofoil boat at typical steering frequencies of 1 Hz and below. In other words, the roll and yaw motions of the boat as a result of the steering input can be predicted with a computer model.
The validated model is used as a basis for HOST, our Flying Fish Hydrofoil Optimization and Simulation Tool. We use HOST to simulate different hydrofoil boats in real-time for our customers. Please get in touch to let us simulate your hydrofoil boat concept or help you with design choices.
Contact us
Thank you for your interest in Flying Fish. Feel free to reach out to us.
We're always open to answer your questions through a friendly conversation.


